

Principales caractéristiques et technologie
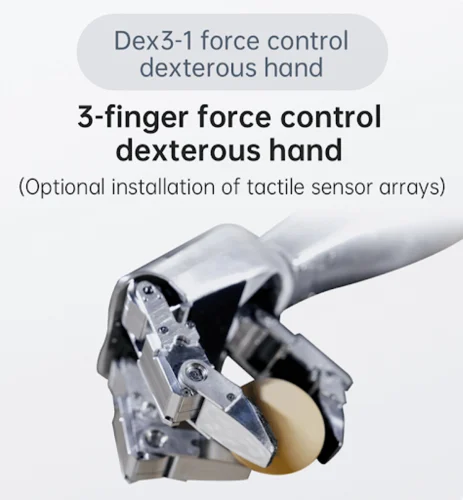
- Contrôle hybride de force et de position : Le Dex3-1 utilise une combinaison de contrôle de force et de position, permettant une interaction très sensible et fiable avec les objets.2 Cette approche hybride permet des opérations précises et délicates, évitant d’endommager les objets fragiles.
- 7 degrés de liberté (DoF) : La main offre un total de 7 degrés de liberté actifs répartis sur ses trois doigts :
- Pouce : 3 DoF
- Index : 2 degrés de liberté
- Doigt du milieu : 2 degrés de liberté
- Détection tactile intégrée : Équipé de 33 capteurs tactiles par main (avec installation d'un réseau de capteurs en option), le Dex3-1 collecte des données de contact riches, offrant au robot un sens du toucher pour une manipulation améliorée, une stabilité de prise adaptative et un contrôle moteur fin.
- Actionnement de haute précision : Le mouvement est entraîné par 6 micro-entraînements directs à articulation de contrôle de force sans balais et 1 micro-entraînement par engrenage à articulation de contrôle de force sans balais, garantissant des mouvements précis, réactifs et puissants avec une précision de répétabilité du bout des doigts de 8$\pm2 \texte{ mm}$.
- Compact et léger : Pesant environ 10$710\texte{g}$ et doté d'une conception compacte, il est conçu pour une intégration transparente sans compromettre l'agilité du robot.
- Performances robustes : Il est capable de saisir des objets jusqu'à 12$500\texte{g}$ et prend en charge un taux de communication élevé de 13$1000\texte{Hz}$ pour une réactivité en temps réel.
- Rétroaction et contrôle complets : Fournit un retour perceptif complet (y compris le mode d'articulation, la position, la vitesse, le couple, la température, la pression du capteur et les données IMU) et prend en charge un retour de contrôle granulaire (y compris les coefficients de rigidité et d'amortissement), ce qui en fait un outil puissant pour la recherche robotique avancée.
Applications
Le Dex3-1 est un accessoire de qualité industrielle idéal pour un large éventail de scénarios de recherche et d'application en robotique de haut niveau, notamment :
- Développement et recherche en robotique humanoïde.
- Expériences d’apprentissage tactile de l’IA et d’interaction homme-robot.
- Simulation de manipulation robotique et de manipulation d'objets.
- Benchmarking de dextérité et développement d'algorithmes de préhension autonome.
En fournissant un effecteur terminal hautement articulé, contrôlé par la force et riche en capteurs, l'Unitree Dex3-1 augmente considérablement la capacité du robot à effectuer des tâches de manipulation complexes et réelles.










Avis
Il n’y a pas encore d’avis.