


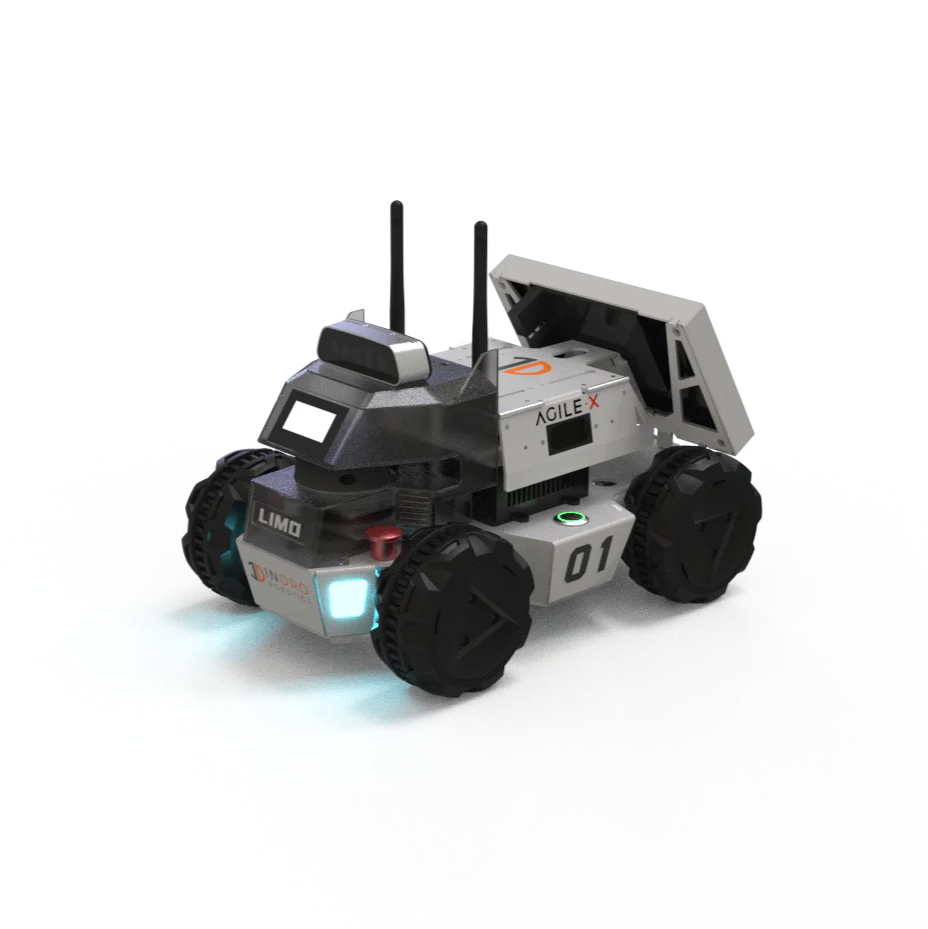

Características principais
- Movimento multimodal: O LIMO é único porque integra quatro modos de direção rapidamente alternáveis por meio de um design mecânico inovador:
- Diferencial de quatro rodas
- Direção Ackermann (como um carro)
- Rastreado (tipo crawler para desempenho off-road)
- Roda Mecanum / Omnidirecional
- Computação embarcada poderosa: Ele é equipado com um PC Industrial (IPC), normalmente um NVIDIA Jetson Nano (Versão padrão) ou NVIDIA Orin Nano (Versão Pro), fornecendo alto poder de computação para IA e algoritmos complexos.
- Conjunto de sensores avançados: A plataforma conta com sensores de alto desempenho para percepção ambiental robusta, incluindo:
- LiDAR 360° (por exemplo, EAI X2L ou T-mini Pro) para mapeamento, navegação e prevenção de obstáculos.
- Câmera de profundidade estéreo (por exemplo, ORBBEC® Dabai) para detecção de profundidade, visão computacional e geração de nuvens de pontos densas.
- IMU (Unidade de Medida Inercial).
- Código aberto e programável: Totalmente compatível com o Sistema Operacional de Robôs (ROS 1 e ROS 2), tornando-o altamente personalizável e acessível para desenvolvedores e pesquisadores. Ele suporta linguagens de programação tradicionais como Python e C++.
- Capacidades Autônomas: O LIMO pode executar aplicações robóticas complexas, incluindo:
- Localização e Mapeamento Simultâneos (SLAM e V-SLAM)
- Posicionamento e Navegação Autônomos
- Planejamento de rotas e prevenção dinâmica de obstáculos
- Reconhecimento visual (por exemplo, reconhecimento de semáforos, detecção de objetos)
- Desenvolvimento amigável ao usuário: Vem pré-instalado com demonstrações e exemplos e geralmente inclui um design especial mesa de areia de simulação para facilitar o ensino prático e os testes em múltiplos cenários.
- Modelos Versáteis: Disponível em várias versões para atender diferentes necessidades, como LIMO padrão, o mais poderoso LIMO Pro, e as LIMUSINE ROS 2 versão com processador Intel NCU i7, rodando na mais recente distribuição ROS.
O Agilex LIMO é uma ferramenta ideal para preencher a lacuna entre o conhecimento teórico e a aplicação prática no campo da robótica móvel e IA.










Avaliações
Ainda não existem avaliações.