

Características principais
- Atuação de precisão: Oferece alta precisão de posicionamento espacial de 3$\pm 1,5$ milímetros para uma operação consistente e confiável.4
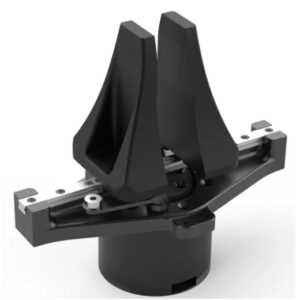
- Pegada potente e flexível: Uma pinça paralela de dois dedos com uma força de preensão máxima de até 5$2$ kg e uma faixa de aderência ajustável de 6$0$ para 7$95$ milímetros, permitindo que ele manuseie uma grande variedade de objetos.8
- Captura de dados multimodais: Integra sensores avançados para percepção ambiental abrangente:9
- Sistema de câmera dupla: Inclui um câmera de profundidade e um câmera grande angular (até 200$^{\circ}$ FOV) para capturar contexto visual, percepção de profundidade e inferência de ação.10
- IMU (Unidade de Medição Inercial) de 9 Eixos sensor.11
- Produz dados essenciais, incluindo Coordenadas espaciais 6D, imagens RGB, profundidade e dados IMU em tempo real.12
- Integração de Robótica: Apresenta um interface de flange universal para montagem perfeita em vários braços robóticos.13
- Design leve: Pesando aproximadamente 14$690$ g, sua estrutura compacta e leve é ideal para plataformas de robôs móveis e sistemas robóticos colaborativos.15
- Pronto para desenvolvimento: Oferece compatibilidade total com ROS1 e ROS2 por meio de uma interface Tipo C, suportando desenvolvimento rápido e fácil integração.16
O PiKA Gripper funciona como o terminal de execução na solução PiKA, geralmente emparelhado com o dispositivo portátil Sentido PiKA unidade e Estações PiKA para um sistema completo e sem calibração que permite coleta de dados rápida e de alta qualidade em diversos ambientes, do laboratório ao campo.17 É uma ferramenta poderosa para pesquisadores que buscam acelerar o treinamento de modelos de IA e a prototipagem rápida em áreas como interação humano-robô e manipulação autônoma.











Avaliações
Ainda não existem avaliações.