


Características principais
- Chassi robótico personalizável ROS: Projetado para ser facilmente integrado e programado usando o Sistema Operacional de Robôs (ROS), tornando-o ideal para projetos avançados de robótica.
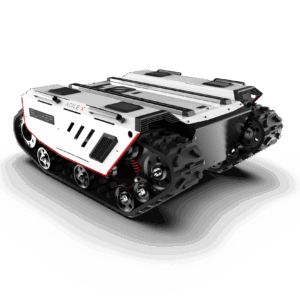
- Mobilidade MCNM (Roda Mecanum): Utiliza rodas Mecanum, que permitem movimento omnidirecional, incluindo movimentação lateral (strafing) e diagonal, oferecendo alta manobrabilidade em vários ambientes.
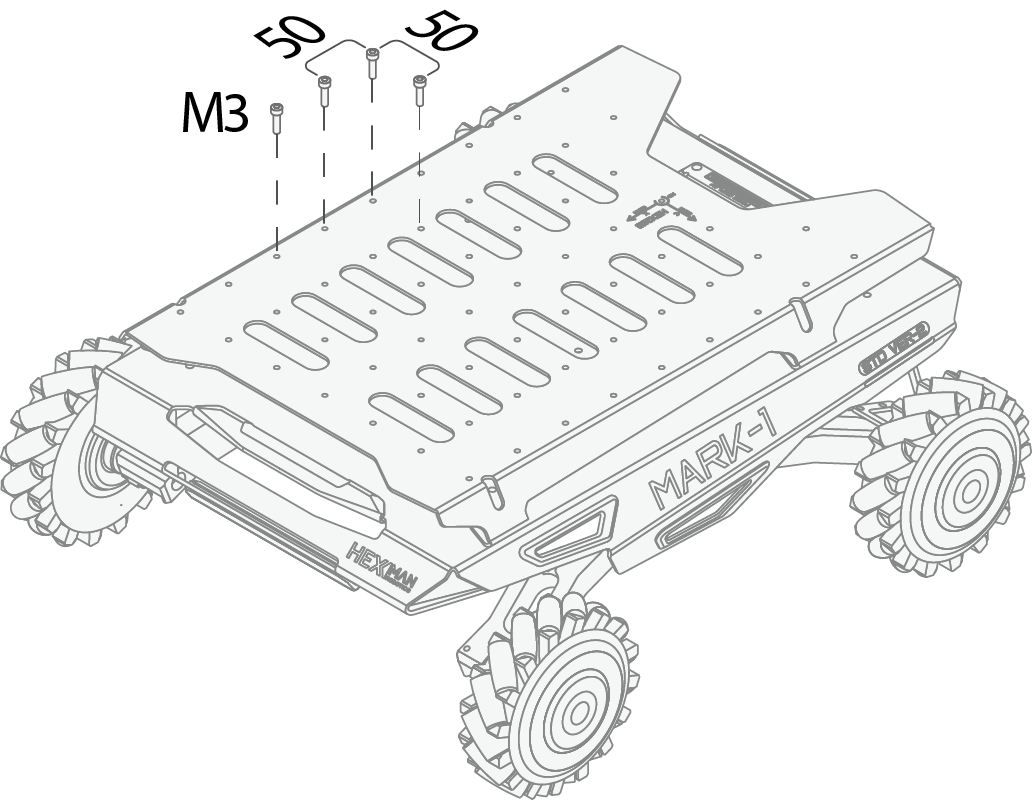
- Suspensão adaptativa com braço oscilante duplo: O chassi é equipado com um método de suspensão adaptativa de braço oscilante duplo, que ajuda o robô a manter tração e estabilidade em terrenos irregulares.
Uso Alvo:
- Educação e treinamento em robótica e sistemas autônomos.
- Pesquisa e desenvolvimento científico.
- Verificação de conceitos e algoritmos de robótica em estágio inicial.
Personalização e expansão:
O design da série Mark permite a personalização da distância e do espaçamento das rodas, bem como a seleção de vários modos de movimento. Pode ser facilmente equipado com:
- Lidar
- Sistemas de câmeras
- GPS
- Módulos de comunicação 4G ou 5G
- Um braço robótico
- Outros componentes modulares
Especificações (Marca 1 – MCNM)
| Recurso | Especificações |
| Modelo | Mark 1 MCNM |
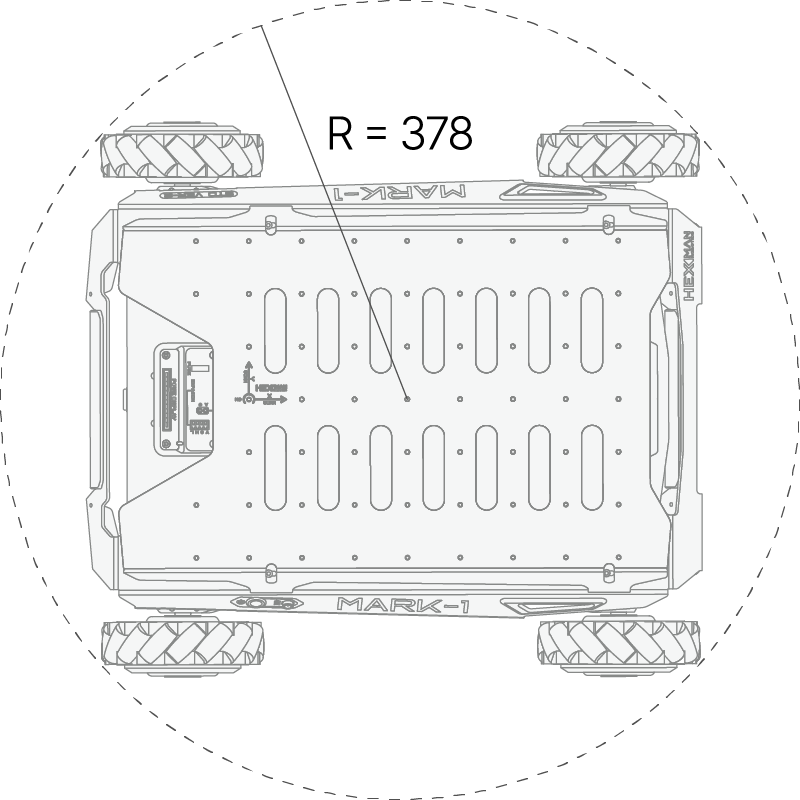
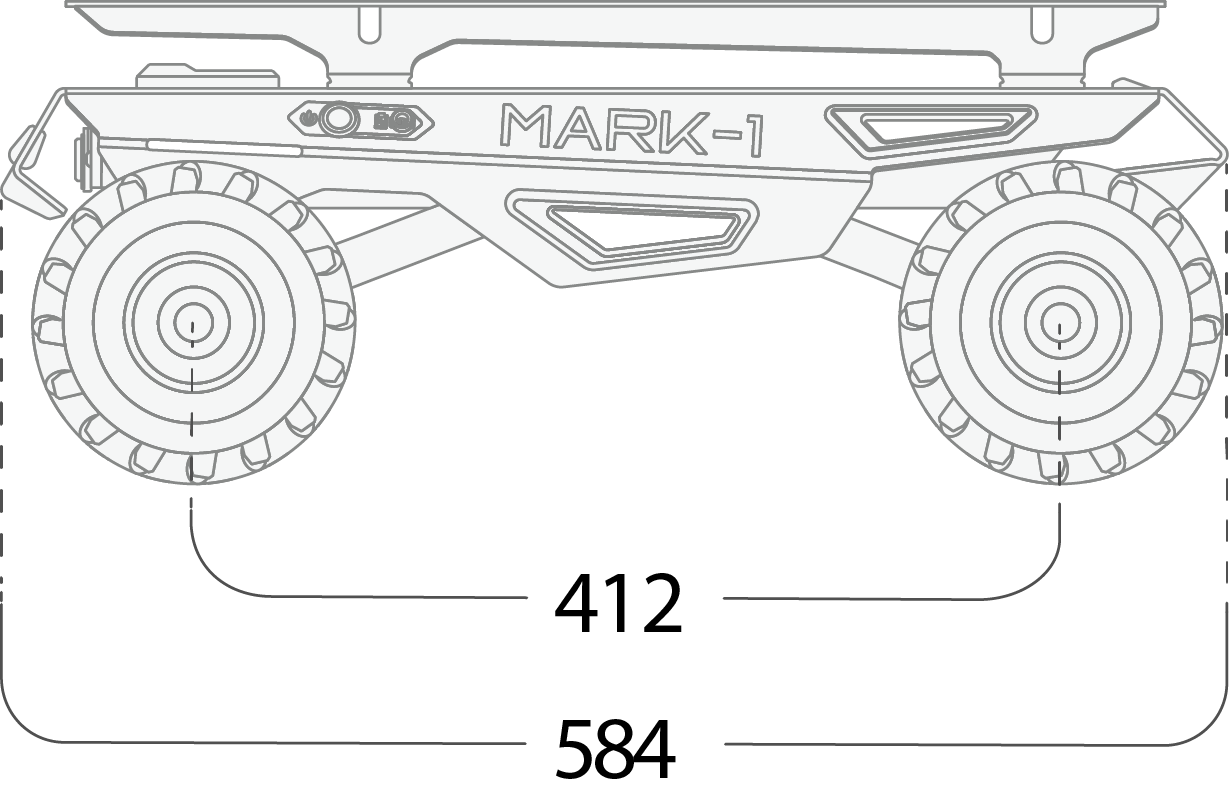
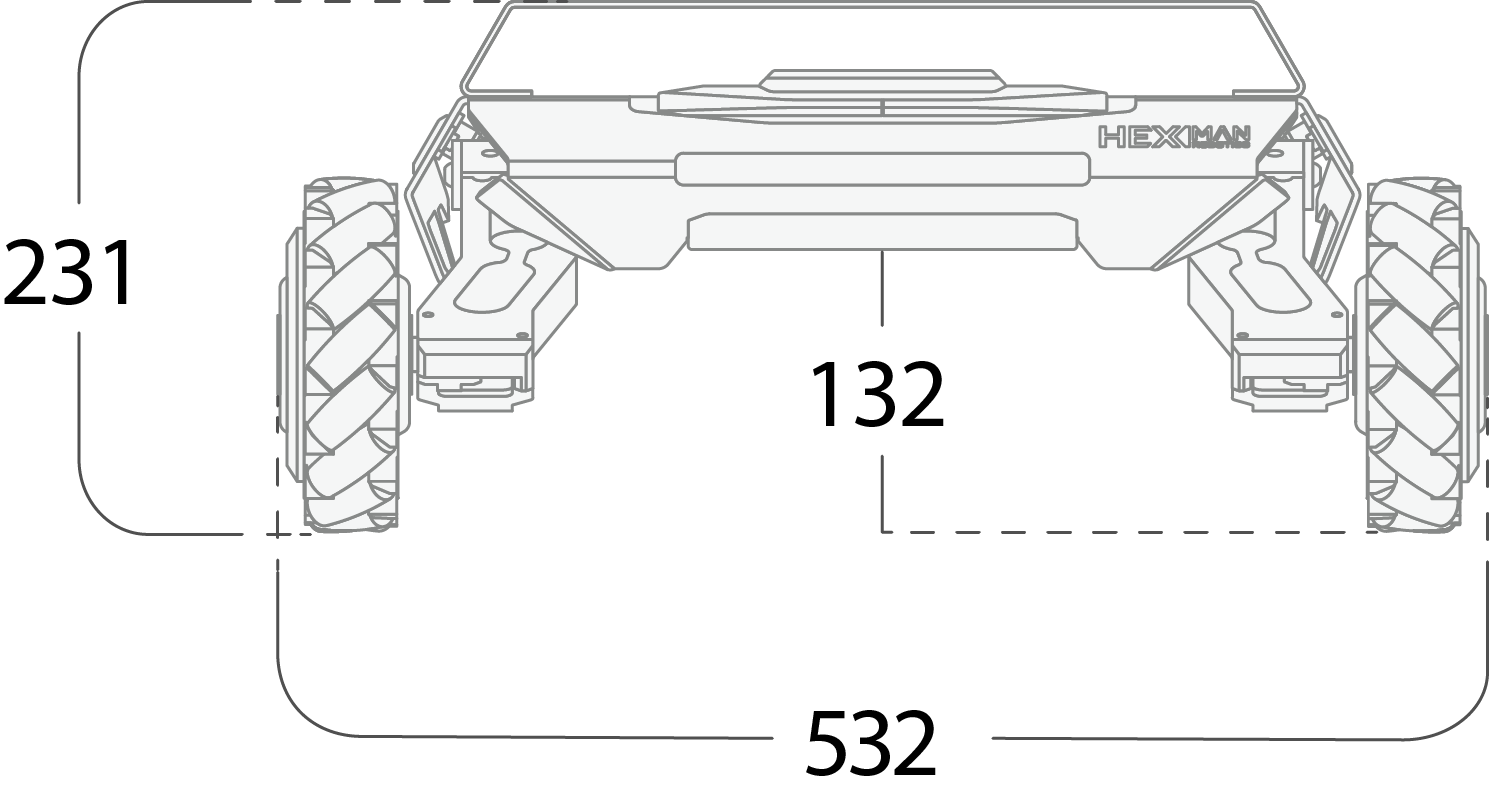
| Dimensões (C x L x A) | 584 x 532 x 231 milímetros |
| Peso | 22 kg |
| Carga útil nominal | 25 kg |
| Velocidade máxima | 3 EM |
| Suspensão | Suspensão adaptável de braço oscilante duplo |
| Bateria | 24 V / 10 Ah |
| Tempo de execução | 3 – 5 horas |
| Interface | Barramento CAN |
| Proteção de entrada (nível IP) | IP22 (Protegido contra objetos sólidos > 12,5mm e água pingando verticalmente) |
| Inclinação máxima | 10º |
| Distância ao solo | 132 milímetros |
O Hexmove MARK 1 – MCNM oferece aos pesquisadores e estudantes uma plataforma robusta, flexível e altamente móvel para desenvolver e testar uma ampla gama de aplicações autônomas.









Avaliações
Ainda não existem avaliações.