

Key Features
- Integrated Tactile Sensing: The standout feature, this version is equipped with 33 pressure sensors per hand (in array configurations on the palm and finger pads/tips). This provides the robot with rich contact data and a sense of “touch,” essential for grasping fragile, irregularly shaped, or unknown objects with confidence and stability.
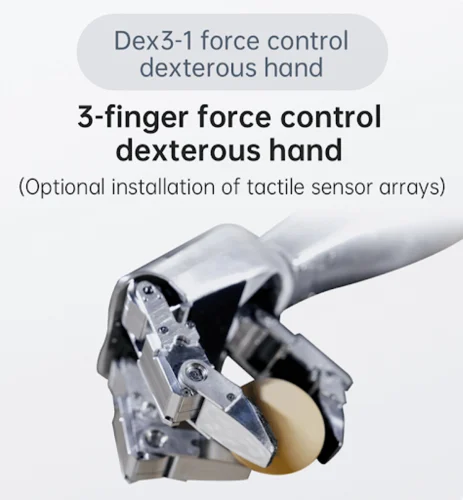
- Force and Position Hybrid Control: This advanced control scheme allows the hand to be sensitive and reliable in its interactions. It can simulate the delicate operations of a human hand, enabling tasks that require both precise movement and controlled force application.
- 7 Degrees of Freedom (DoF): The three-finger design offers a high degree of articulation for versatile grasping patterns:
- Thumb: 3 active DoF
- Index Finger: 2 active DoF
- Middle Finger: 2 active DoF
- High Precision Actuation: Utilizes a combination of 6 micro brushless force-control joint direct drives and 1 micro brushless force-control joint gear drive for responsive and accurate movements.
- Robust Performance: Capable of grasping objects up to 500g (under specified load conditions), making it suitable for a variety of object handling and manipulation scenarios.
- Comprehensive Feedback: Provides extensive real-time perceptual data at a high 1000Hz communication rate, including joint position, velocity, torque, temperature, and crucial sensor pressure values from the tactile array.
- Compact and Lightweight: Weighing approximately 710g, the hand is designed for seamless integration with the Unitree G1 without compromising the robot’s overall agility.
Applications
The Dex3-1 (Tactile Version) is an ideal tool for advanced robotics research and practical deployment in tasks requiring high dexterity and sensory feedback:
- Humanoid Robotics Research: Perfect for studying bimanual manipulation, whole-body control, and complex task execution.
- AI Tactile Learning: Enables advanced experiments in reinforcement learning and AI training by providing rich, high-fidelity contact data.
- Precision Object Handling: Excels at manipulating delicate items, such as laboratory instruments, electronic components, or fragile consumer goods (e.g., eggs, bottles).
- Dexterity Benchmarking: A high-performance platform for developing and testing new autonomous grasping and manipulation algorithms.
- Robotic Simulation: Provides realistic data for simulating human-robot interaction and complex physical tasks.
Transform your Unitree G1 into a highly capable and versatile agent ready to perform intricate tasks with the finesse of a human operator, backed by the certainty of tactile feedback.










Reviews
There are no reviews yet.