


Características y capacidades clave
- Pila completa e integrada: Combina un potente hardware de sensores con código abierto Autoware marco de software, construido sobre el Sistema operativo robótico (ROS).3
- Localización de alta precisión: Utiliza 3D SLAM (Localización y mapeo simultáneos) tecnología de localización, que a menudo incluye una LiDAR multilínea (por ejemplo, RoboSense RS-LiDAR-16) para 4$\pm 2 \texto{cm}$ precisión típica y un rango de medición de hasta 5$150 \texto{m}$.6
- Adaptabilidad a todo terreno: Se integra perfectamente con varios chasis de robots todoterreno AgileX (como HUNTER, BUNKER, SCOUT, etc.), lo que lo hace adecuado tanto para vía urbana y entornos todoterreno.7
- Funciones autónomas básicas: Admite funciones críticas esenciales para la navegación autónoma:8
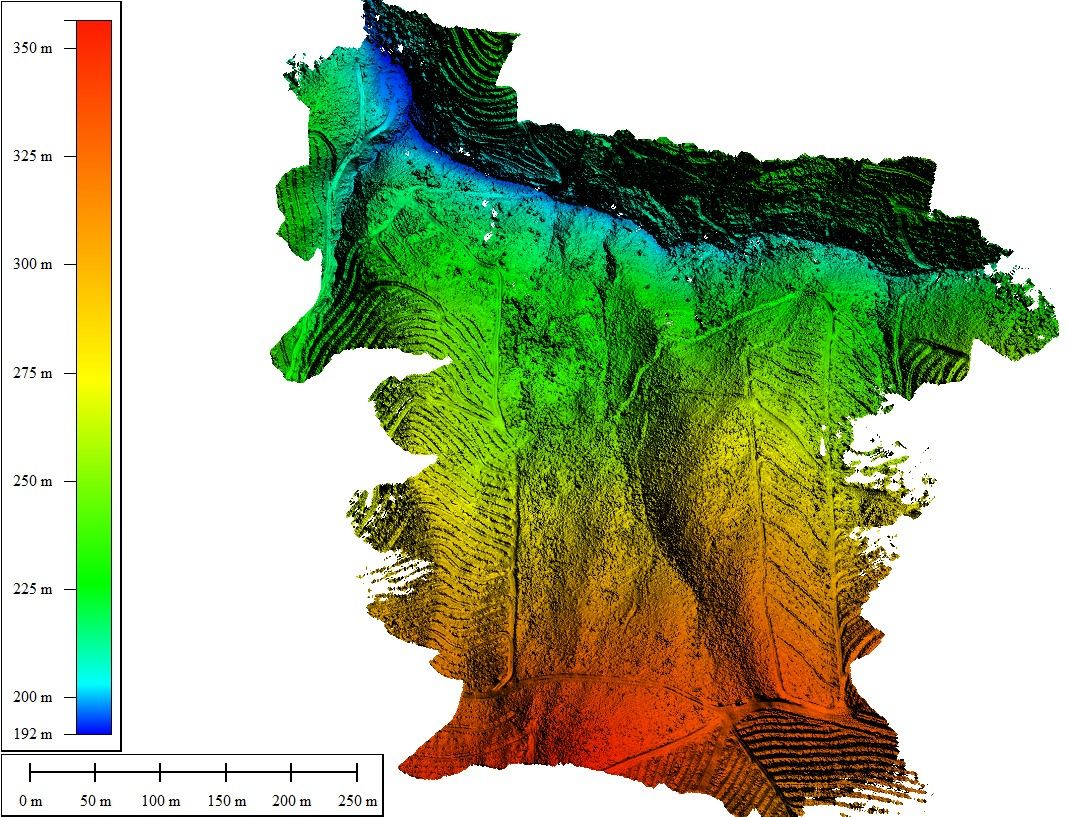
- Mapeo de nubes de puntos 3D9
- Localización y navegación mediante datos de nubes de puntos 3D10
- Planificación de rutas autónomas con evitación de obstáculos
- Maniobras avanzadas como estacionamiento y cambios de carril
- Edición de mapas vectoriales (para líneas de carriles, pasos de cebra, etc.)11
- Código abierto y extensible: La arquitectura basada en ROS permite una fácil integración de bibliotecas existentes o nuevas cargas útiles y sensores (como módulos GPS, cámaras de profundidad, etc.) para aplicaciones personalizadas.12
- Listo para el desarrollo: Incluye un potente sistema de control industrial (por ejemplo, CPU Intel i7) y nodos ROS preinstalados, lo que permite a los usuarios iniciar rápidamente la investigación y la implementación de robots autónomos.13
Ideal para:
- Investigación académica y educación en robótica y sistemas autónomos.14
- Desarrolladores de la industria que buscan una plataforma lista para usar para crear prototipos y validar algoritmos de conducción autónoma.15
- Proyectos que requieren operación de vehículos controlados por cable a través de ROS.16










Valoraciones
No hay valoraciones aún.