

Características clave
- Chasis robótico personalizable ROS: Diseñado para integrarse y programarse fácilmente mediante el Sistema Operativo Robot (ROS), lo que lo hace ideal para proyectos de robótica avanzados.
- Movilidad MCNM (Mecanum Wheel): Utiliza ruedas Mecanum, que permiten un movimiento omnidireccional, incluido el movimiento de lado a lado (avance lateral) y en diagonal, ofreciendo una gran maniobrabilidad en diversos entornos.
- Suspensión adaptativa de doble brazo oscilante: El chasis está equipado con un método de suspensión adaptativa de doble brazo oscilante, que ayuda al robot a mantener la tracción y la estabilidad en terrenos irregulares.
Uso previsto:
- Educación y formación en robótica y sistemas autónomos.
- Investigación y desarrollo científico.
- Verificación de conceptos y algoritmos robóticos en etapas iniciales.
Personalización y expansión:
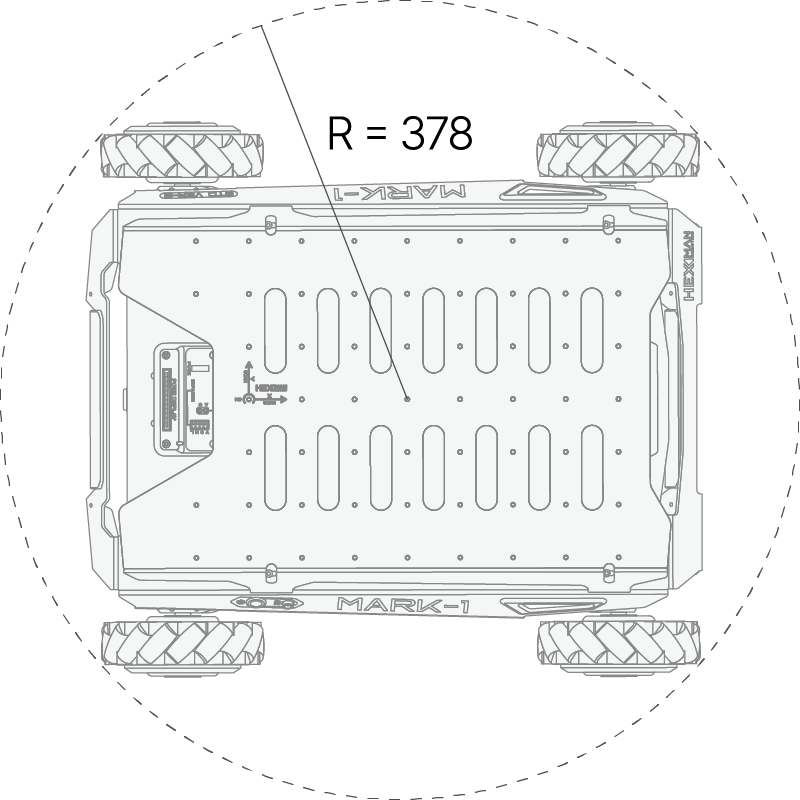
El diseño de la serie Mark permite personalizar la distancia y el espaciado de las ruedas, así como la selección de varios modos de movimiento. Se puede equipar fácilmente con:
- LIDAR
- Sistemas de cámaras
- GPS
- Módulos de comunicación 4G o 5G
- Un brazo robótico
- Otros componentes modulares
Especificaciones (Mark 1 – MCNM)
| Característica | Especificación |
| Modelo | Marca 1 MCNM |
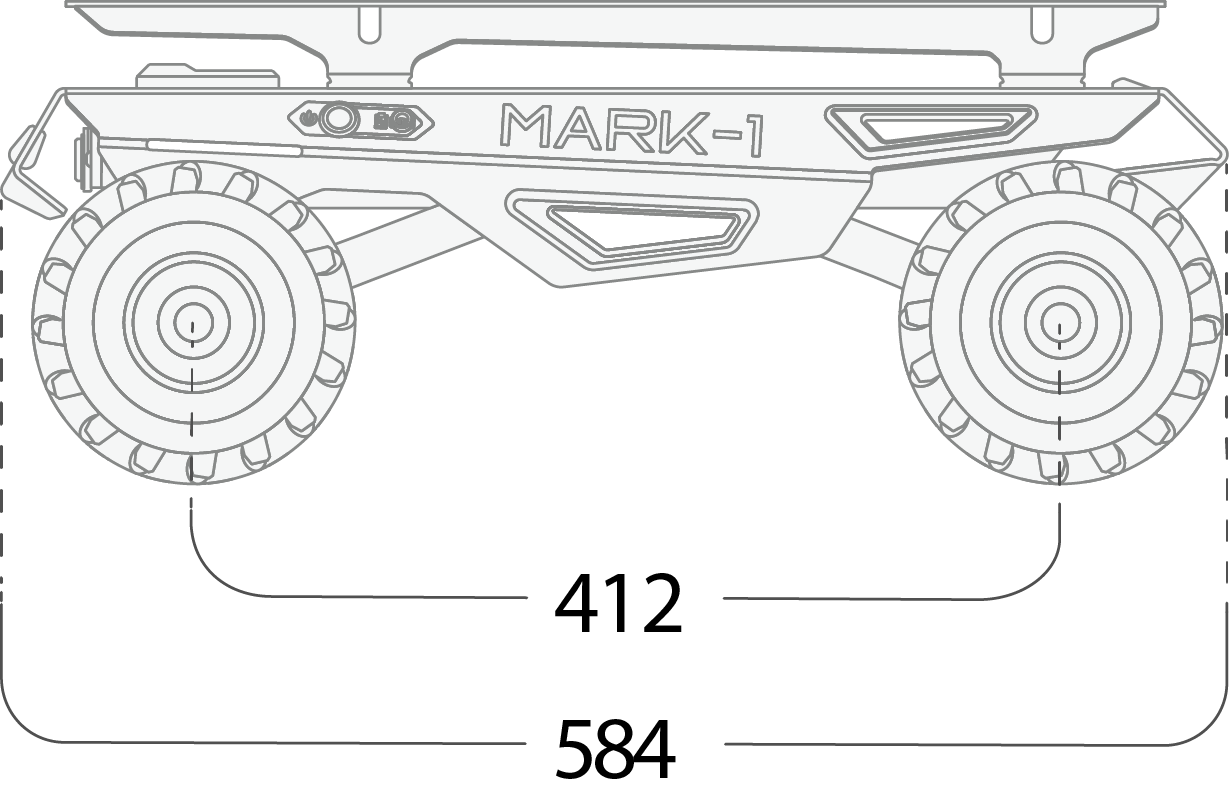
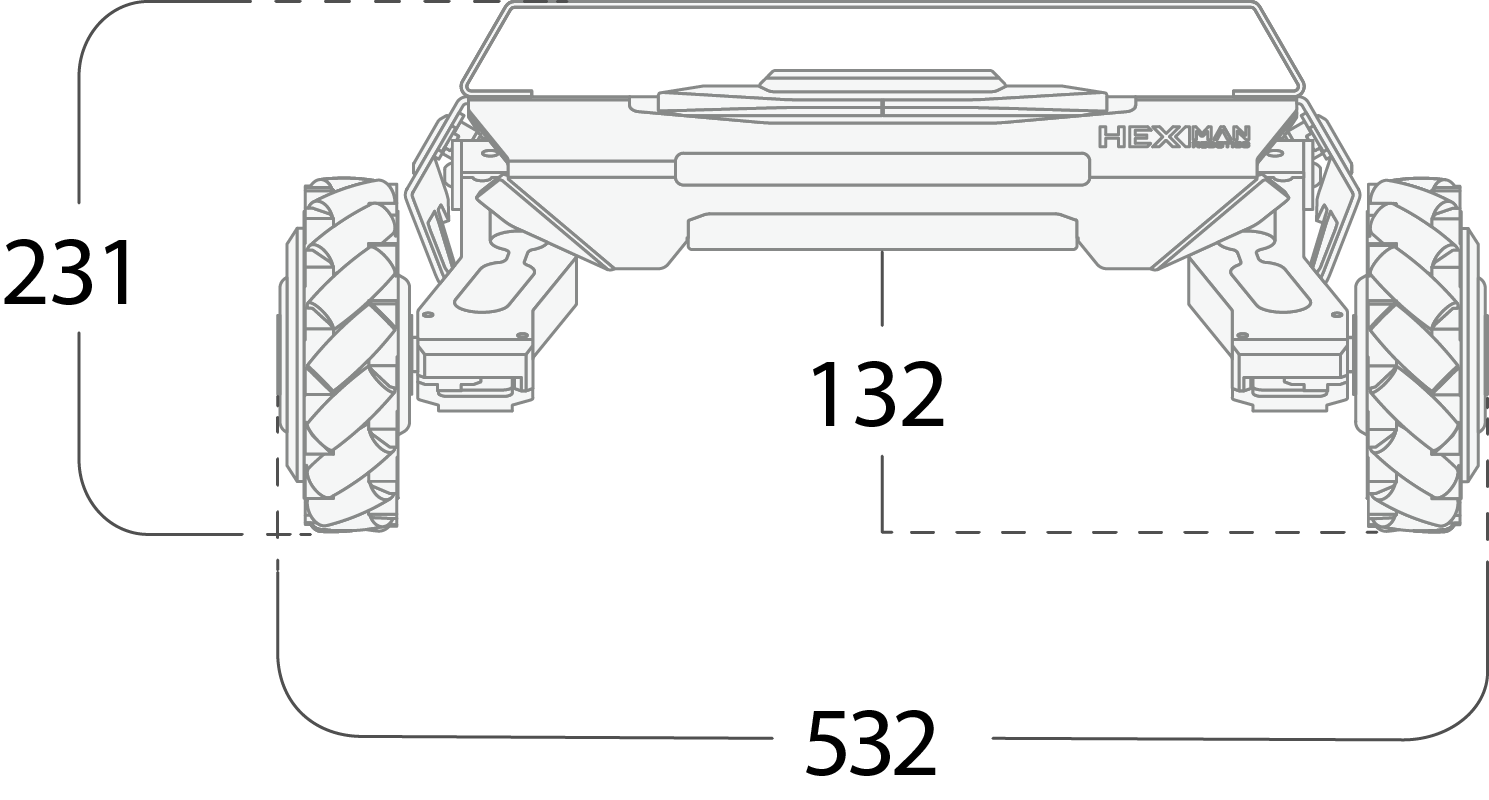
| Dimensiones (largo x ancho x alto) | 584 x 532 x 231 milímetros |
| Peso | 22 kg |
| Carga útil nominal | 25 kg |
| Máxima velocidad | 3 EM |
| Suspensión | Suspensión adaptativa de doble brazo oscilante |
| Batería | 24 V / 10 Ah |
| Tiempo de ejecución | 3 – 5 horas |
| Interfaz | Bus CAN |
| Protección de entrada (nivel IP) | IP22 (Protegido contra objetos sólidos) > 12.5mm y goteando agua verticalmente) |
| Pendiente máxima | 10º |
| Distancia al suelo | 132 milímetros |
Hexmove MARK 1 – MCNM ofrece a investigadores y estudiantes una plataforma robusta, flexible y altamente móvil para desarrollar y probar una amplia gama de aplicaciones autónomas.










Valoraciones
No hay valoraciones aún.