

Características clave
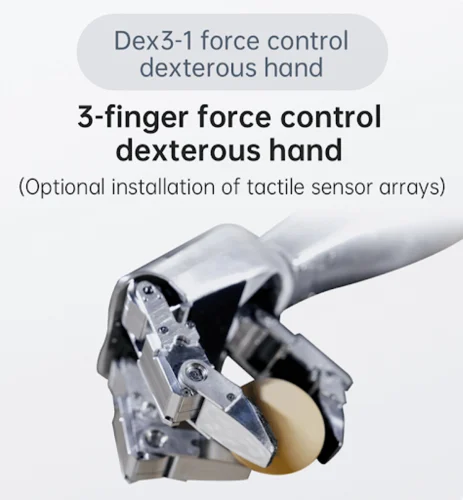
- Detección táctil integrada: La característica más destacada de esta versión es que está equipada con 33 sensores de presión por mano (en configuraciones de matriz en la palma y en las yemas/puntas de los dedos). Esto proporciona al robot valiosos datos de contacto y un sentido del “tacto”, esencial para agarrar objetos frágiles, de formas irregulares o desconocidos con confianza y estabilidad.
- Control híbrido de fuerza y posición: Este esquema de control avanzado permite que la mano sea sensible y confiable en sus interacciones. Puede simular las delicadas operaciones de una mano humana, permitiendo realizar tareas que requieren tanto un movimiento preciso como una aplicación de fuerza controlada.
- 7 grados de libertad (GdL): El diseño de tres dedos ofrece un alto grado de articulación para patrones de agarre versátiles:
- Pulgar: 3 grados de libertad activos
- Dedo índice: 2 grados de libertad activos
- Dedo medio: 2 grados de libertad activos
- Actuación de alta precisión: Utiliza una combinación de 6 micro transmisiones directas de control de fuerza sin escobillas y 1 micro transmisión por engranajes de control de fuerza sin escobillas para lograr movimientos precisos y con capacidad de respuesta.
- Rendimiento robusto: Capaz de agarrar objetos de hasta 500 gramos (bajo condiciones de carga específicas), lo que lo hace adecuado para una variedad de escenarios de manipulación y manejo de objetos.
- Retroalimentación completa: Proporciona amplios datos perceptivos en tiempo real a un alto nivel Velocidad de comunicación de 1000 Hz, incluida la posición de la articulación, la velocidad, el torque, la temperatura y factores cruciales. valores de presión del sensor de la matriz táctil.
- Compacto y ligero: Con un peso aproximado 710 gramosLa mano está diseñada para una integración perfecta con el Unitree G1 sin comprometer la agilidad general del robot.
Aplicaciones
El Dex3-1 (versión táctil) es una herramienta ideal para la investigación robótica avanzada y el despliegue práctico en tareas que requieren alta destreza y retroalimentación sensorial:
- Investigación en robótica humanoide: Perfecto para estudiar la manipulación bimanual, el control de todo el cuerpo y la ejecución de tareas complejas.
- Aprendizaje táctil con IA: Permite realizar experimentos avanzados en aprendizaje de refuerzo y entrenamiento de IA al proporcionar datos de contacto completos y de alta fidelidad.
- Manejo de objetos de precisión: Se destaca en la manipulación de artículos delicados, como instrumentos de laboratorio, componentes electrónicos o bienes de consumo frágiles (por ejemplo, huevos, botellas).
- Evaluación comparativa de destreza: Una plataforma de alto rendimiento para desarrollar y probar nuevos algoritmos autónomos de agarre y manipulación.
- Simulación robótica: Proporciona datos realistas para simular la interacción humano-robot y tareas físicas complejas.
Transforme su Unitree G1 en un agente altamente capaz y versátil, listo para realizar tareas complejas con la delicadeza de un operador humano, respaldado por la certeza de la retroalimentación táctil.









Valoraciones
No hay valoraciones aún.