


Key Features and Specifications
- Design Focus: Exploratory level robot chassis, strong scalability, high engine power, and cost-effectiveness.
- Application: Suitable for secondary development of indoor and outdoor mobile tasks.
- Payload: Rated load of 80 kg.
- Speed: Maximum speed of 1.5 m/s.
- Drive Mode: 2-wheel drive (differential steering). The general ECHO model is described as a four-wheel drive for indoor/shallow outdoor terrain, but the STD version specifically mentions 2-wheel drive.
- Battery: 24 V / 10 Ah.
- Runtime: Approximately 8 – 10 hours (for the general ECHO model).
- Communication: CAN bus.
- Dimensions (L x W x H): Approximately 370 × 380 × 140 mm (for the general ECHO model).
It serves as a robust foundation for Artificial Intelligence (AI) and research projects, offering a reliable mobile base for developers to integrate sensors, actuators, and custom software.
Includes (Typically): Robot chassis, battery charger, aviation plug adapter cable (4pin). Wireless remote control and toolbox are often optional accessories.
SPECIFICATIONS
| Model | Echo Ed |
| Dimensions L x W x H | 370 × 380 × 140 mm |
| Turning radius | 295 mm |
| Ground clearance | 35 mm |
| Weight | 13 kg |
| Payload | 30 kg |
| Speed | 2 m/s |
| Max slope | 5° |
| Max obstacle height (unloaded) | 10 mm |
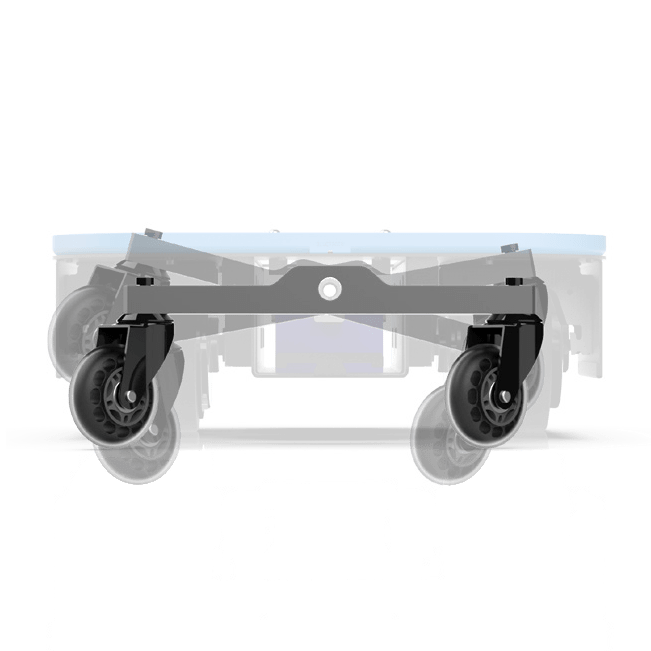
| Steering | 2 differential wheels, 2 following wheels |
| Runtime [1] | 3 – 5 h |
| Motors | 2 × 100 W |
| Encoder | 4096 |
| Batteries | 24 V / 5 Ah |
| Time to charge | 3 h |
| Interface | CAN |
| Ingress protection | IP22 |
| Operating temperature | 0 °C to 40 °C |
[1] The runtime is strongly influenced by the working conditions. Errors and technical modification subject to change.










Reviews
There are no reviews yet.