
Key Features
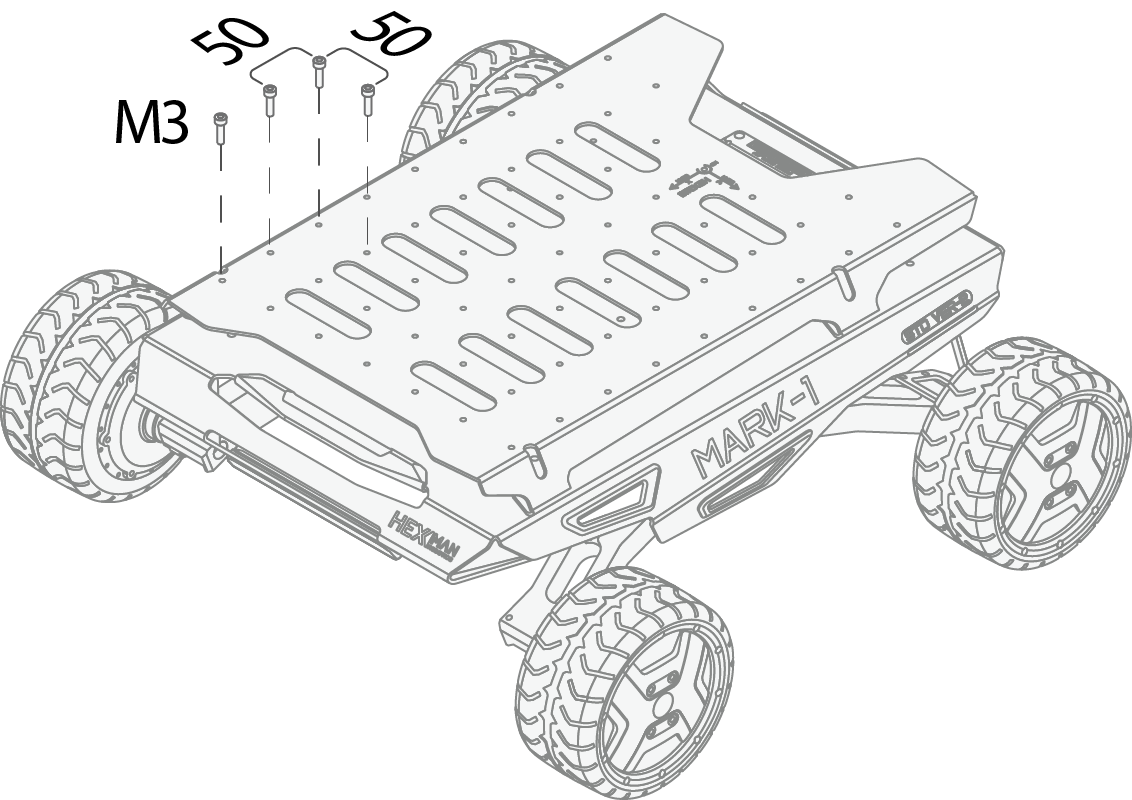
- ROS Customisable Robotic Chassis: Built to seamlessly integrate with the Robot Operating System (ROS), providing a flexible and powerful development environment for advanced robotics projects.
- Differential Drive System (DIFF): Utilizes a robust differential steering mechanism for agile and precise movement control.
- Dual Swing Arm Adaptive Suspension: Equipped with a sophisticated dual swing arm adaptive suspension method, allowing the robot to maintain ground contact and navigate various terrains with stability.
- Robust Load Capacity: Capable of handling a rated load of up to 25 kg, making it suitable for carrying a variety of sensors, manipulators, and other custom payloads.
- Power and Communication: Features a 24 V 14.4 Ah battery (Note: a ‘Pro’ version may have a larger battery) and a CAN bus interface for reliable communication.
- Build Quality: Designed with an IP22 ingress protection level.
Whether you are developing complex mobile tasks, testing new algorithms, or simply teaching fundamental robotics principles, the Hexmove MARK 1 – DIFF provides the durable hardware and open software architecture you need to succeed.
Specifications
| Model | Mark 1 Diff |
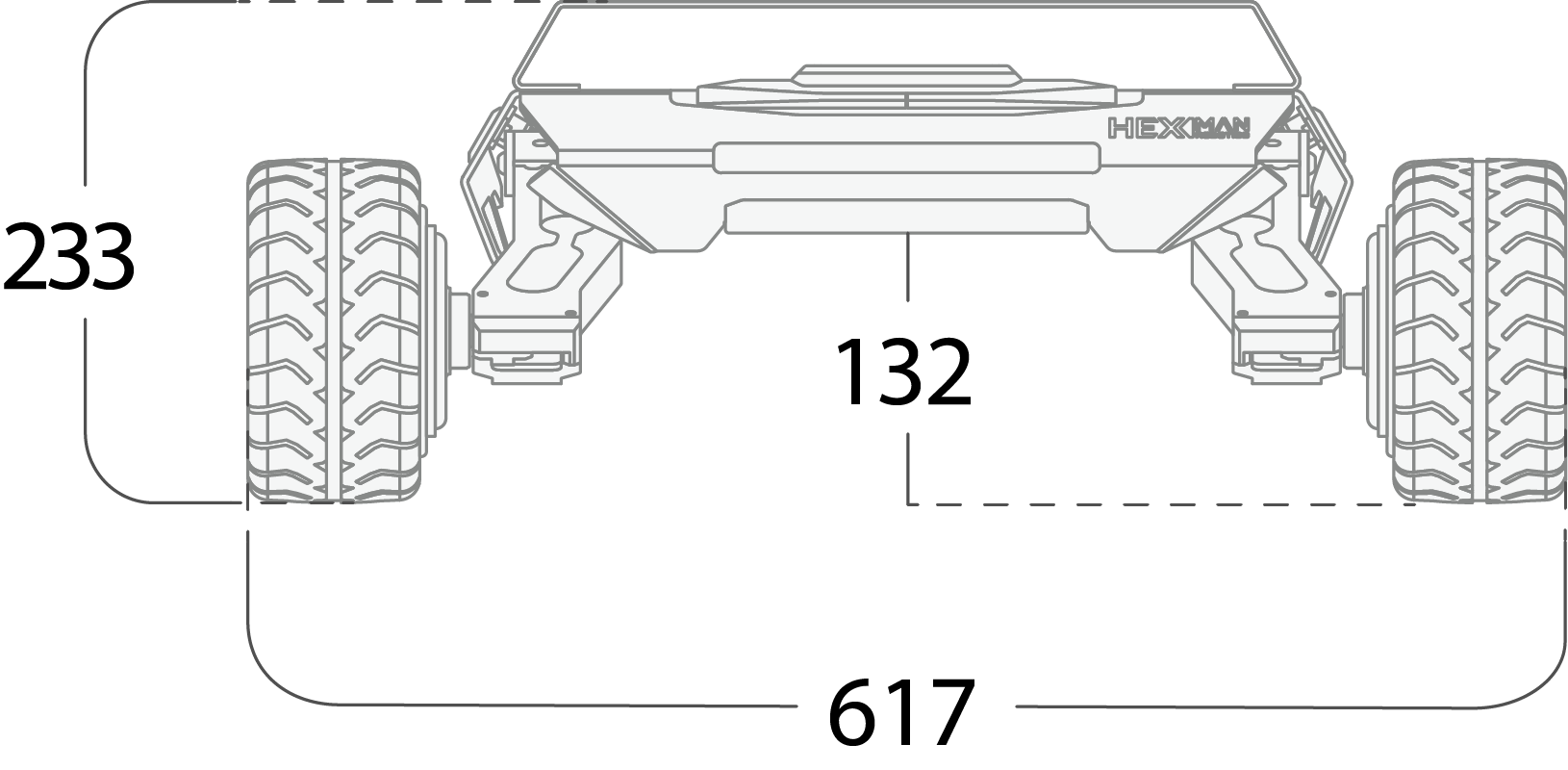
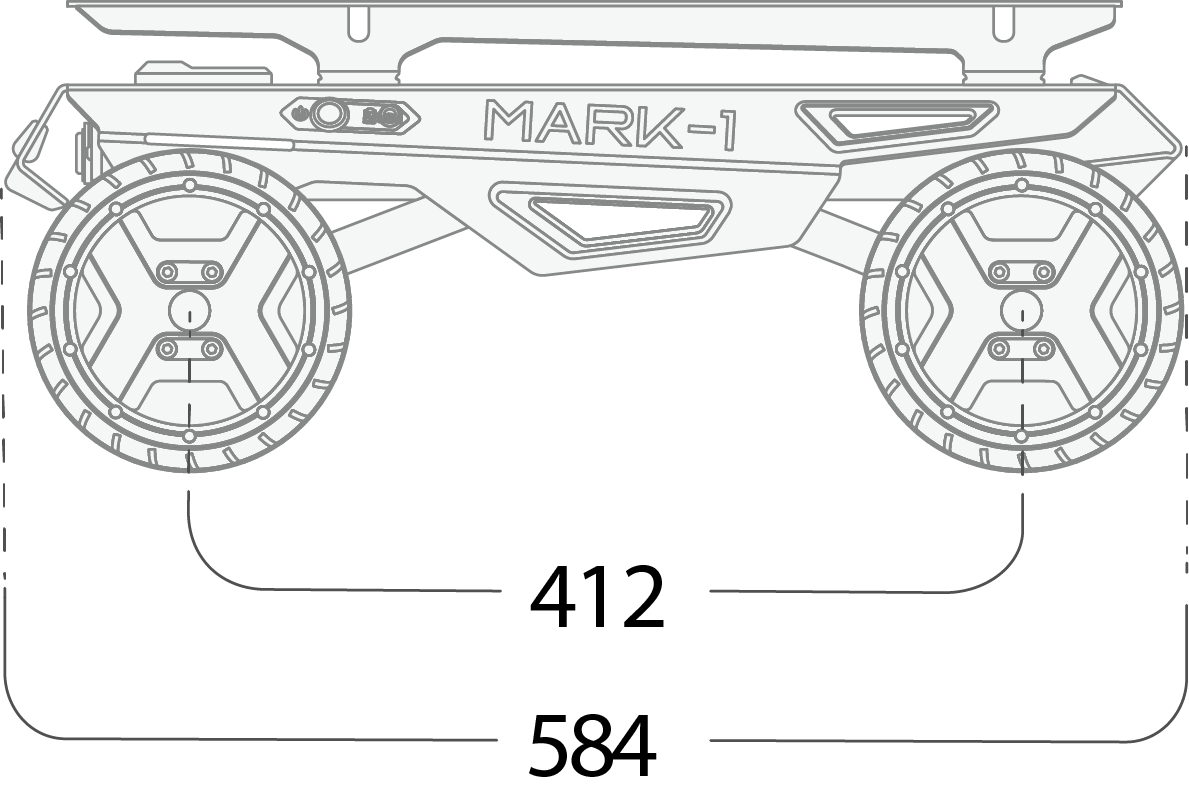
| Dimensions L x W x H | 584 × 617 × 233 mm |
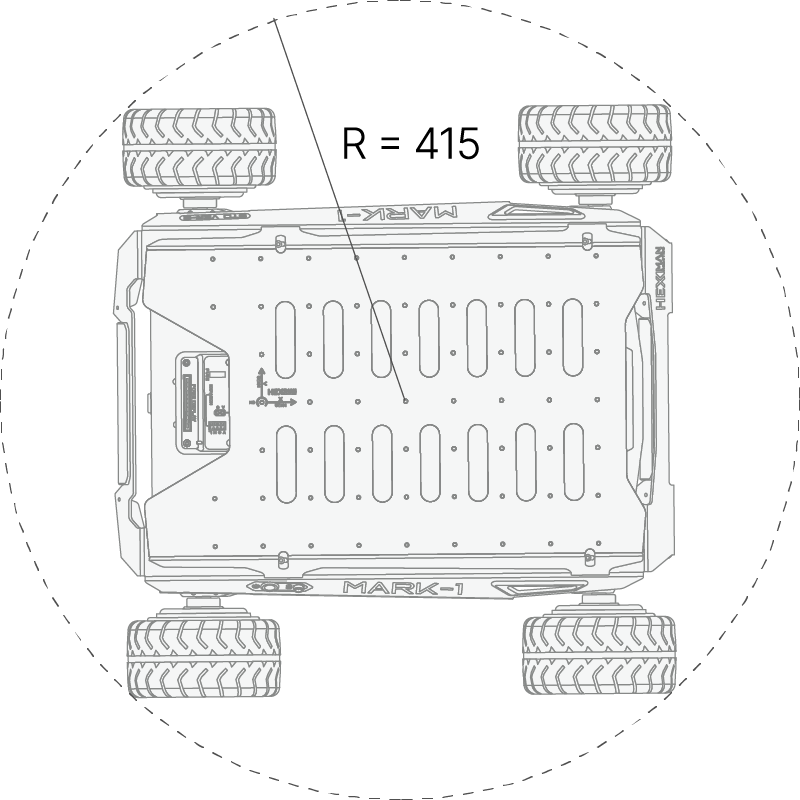
| Turning radius | 415 mm |
| Ground clearance | 132 mm |
| Weight | 22 kg |
| Payload | 25 kg |
| Speed | 2 m/s |
| Max slope | 40° (unloaded) / 15° (loaded) |
| Max obstacle height (unloaded) | 90 mm |
| Suspension | Double wishbone |
| Runtime [1] | 3 – 5 h |
| Motors | 4 × 250 W |
| Encoder | 4096 |
| Batteries | 24 V / 14.4 Ah |
| Time to charge | 6 h |
| Interface | CAN |
| Ingress protection | IP22 |
| Operating temperature | 0 °C to 40 °C |
[1] The runtime is strongly influenced by the working conditions. Errors and technical modification subject to change.










Reviews
There are no reviews yet.