
Principais recursos e tecnologia
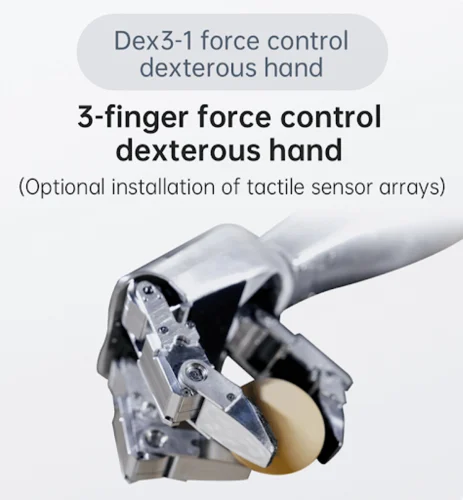
- Controle Híbrido de Força e Posição: O Dex3-1 emprega uma combinação de controle de força e posição, permitindo uma interação altamente sensível e confiável com objetos.2 Essa abordagem híbrida permite operações precisas e delicadas, evitando danos a itens frágeis.
- 7 Graus de Liberdade (GdL): A mão oferece um total de 7 graus ativos de liberdade distribuídos em seus três dedos:
- Polegar: 3 DoF
- Dedo indicador: 2 DoF
- Dedo médio: 2 DoF
- Detecção tátil integrada: Equipado com 33 sensores táteis por mão (com instalação opcional de conjunto de sensores), o Dex3-1 coleta dados de contato ricos, fornecendo ao robô uma sensação de tato para manipulação aprimorada, estabilidade de pegada adaptável e controle motor fino.
- Atuação de alta precisão: O movimento é acionado por 6 micro acionamentos diretos de junta de controle de força sem escovas e 1 micro acionamento de engrenagem de junta de controle de força sem escovas, garantindo movimentos precisos, responsivos e poderosos com uma precisão de repetibilidade na ponta dos dedos de 8$\pm2 \texto{ mm}$.
- Compacto e leve: Pesando aproximadamente 10$710\texto{g}$ e com um design compacto, ele foi projetado para integração perfeita sem comprometer a agilidade do robô.
- Desempenho robusto: É capaz de agarrar objetos de até 12$500\texto{g}$ e suporta uma alta taxa de comunicação de 13$1000\texto{Hz}$ para capacidade de resposta em tempo real.
- Feedback e controle abrangentes: Fornece amplo feedback perceptual (incluindo modo de articulação, posição, velocidade, torque, temperatura, pressão do sensor e dados IMU) e suporta feedback de controle granular (incluindo coeficientes de rigidez e amortecimento), tornando-o uma ferramenta poderosa para pesquisa avançada em robótica.
Aplicações
O Dex3-1 é um acessório de nível industrial ideal para uma ampla gama de cenários de pesquisa e aplicação de robótica de alto nível, incluindo:
- Desenvolvimento e pesquisa em robótica humanoide.
- Experimentos de aprendizagem tátil de IA e interação humano-robô.
- Simulação de manipulação robótica e manuseio de objetos.
- Benchmarking de destreza e desenvolvimento de algoritmo de preensão autônoma.
Ao fornecer um efetor final altamente articulado, controlado por força e rico em sensores, o Unitree Dex3-1 eleva significativamente a capacidade do robô de executar tarefas complexas de manipulação do mundo real.









Avaliações
Não existem opiniões ainda.